My Projects
A collection of robotics, AI, and mechatronics projects showcasing my expertise and innovation.

JobLens - AI-Powered CV Analysis & Enhancement Tool
Intelligent CV analysis platform leveraging LangChain, FAISS vector databases, and advanced language models to provide comprehensive resume feedback. Analyzes CV structure, content quality, and job compatibility to help job seekers optimize their resumes for better career opportunities.
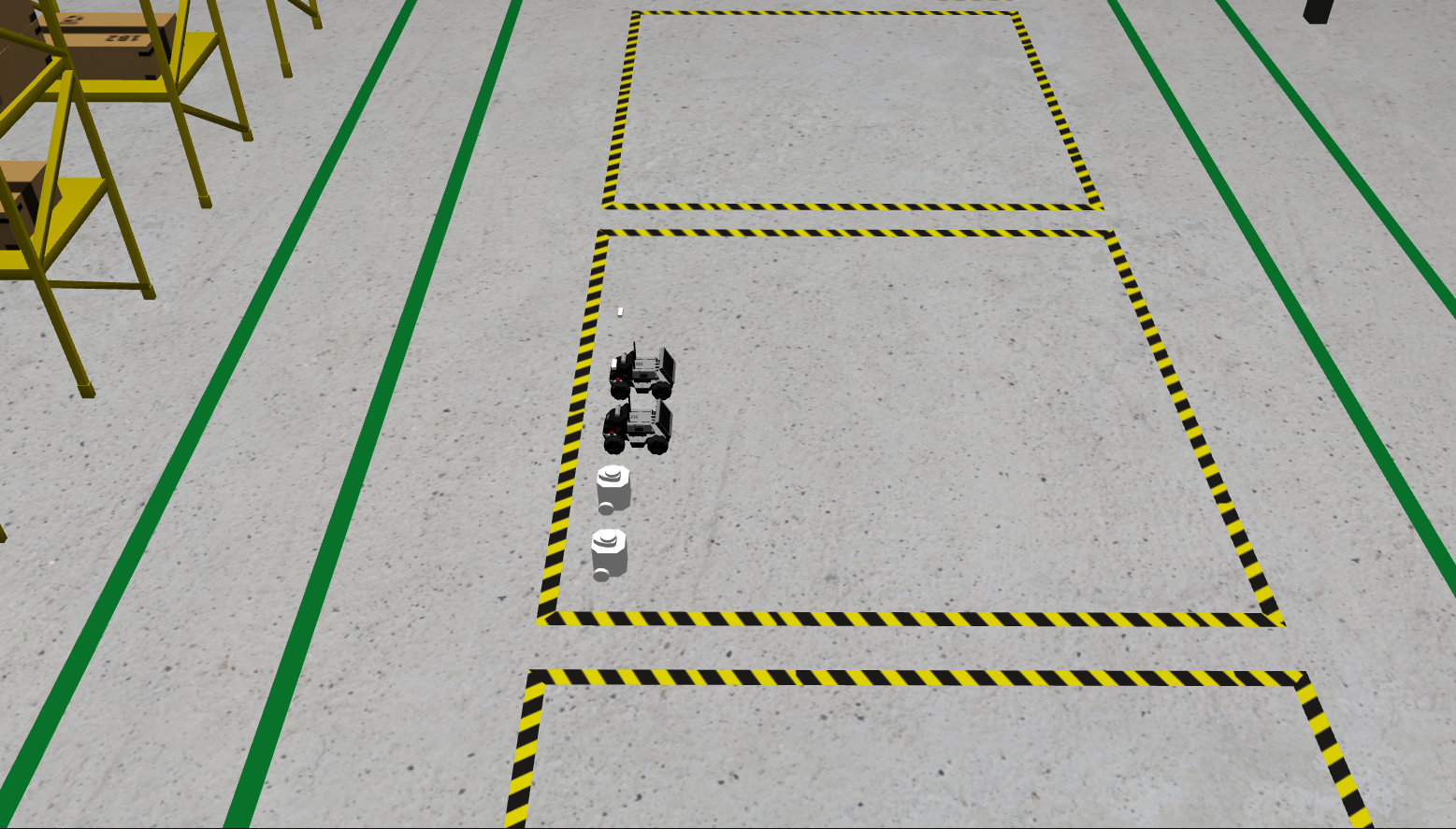
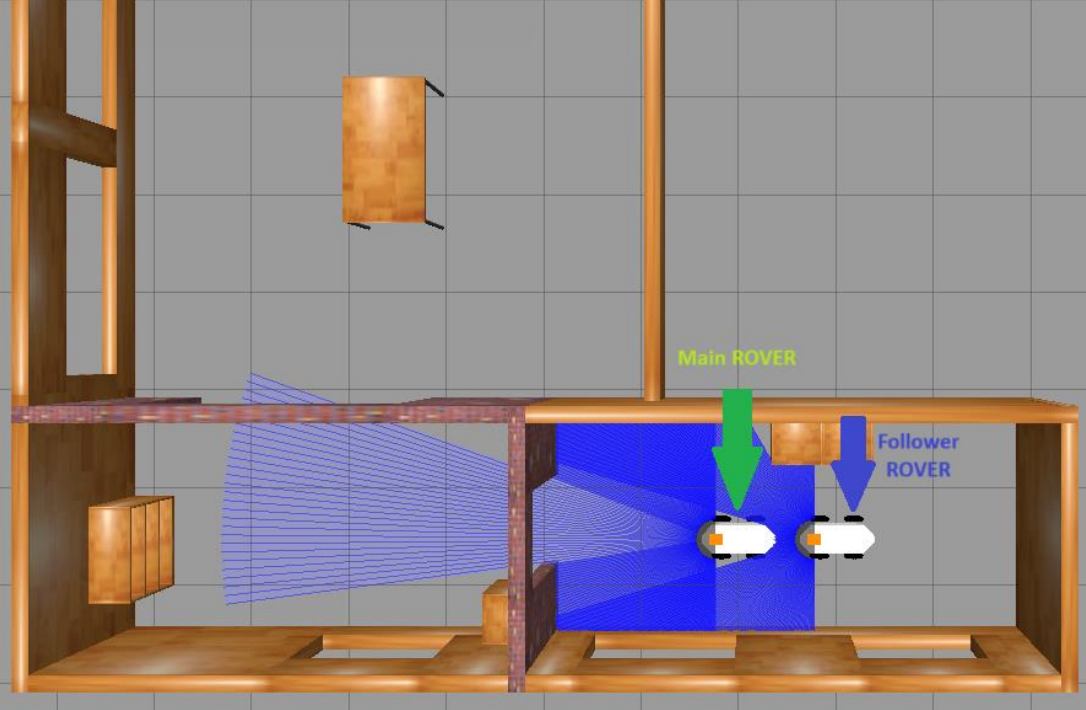
Software Architecture Master-Slave
Based on the use of UGVs and ROS2 Humble, applying software architecture techniques and robust design patterns. The results confirmed that, under the master-slave structure, the system completes all assigned tasks, even in case of failure of one or more robots.
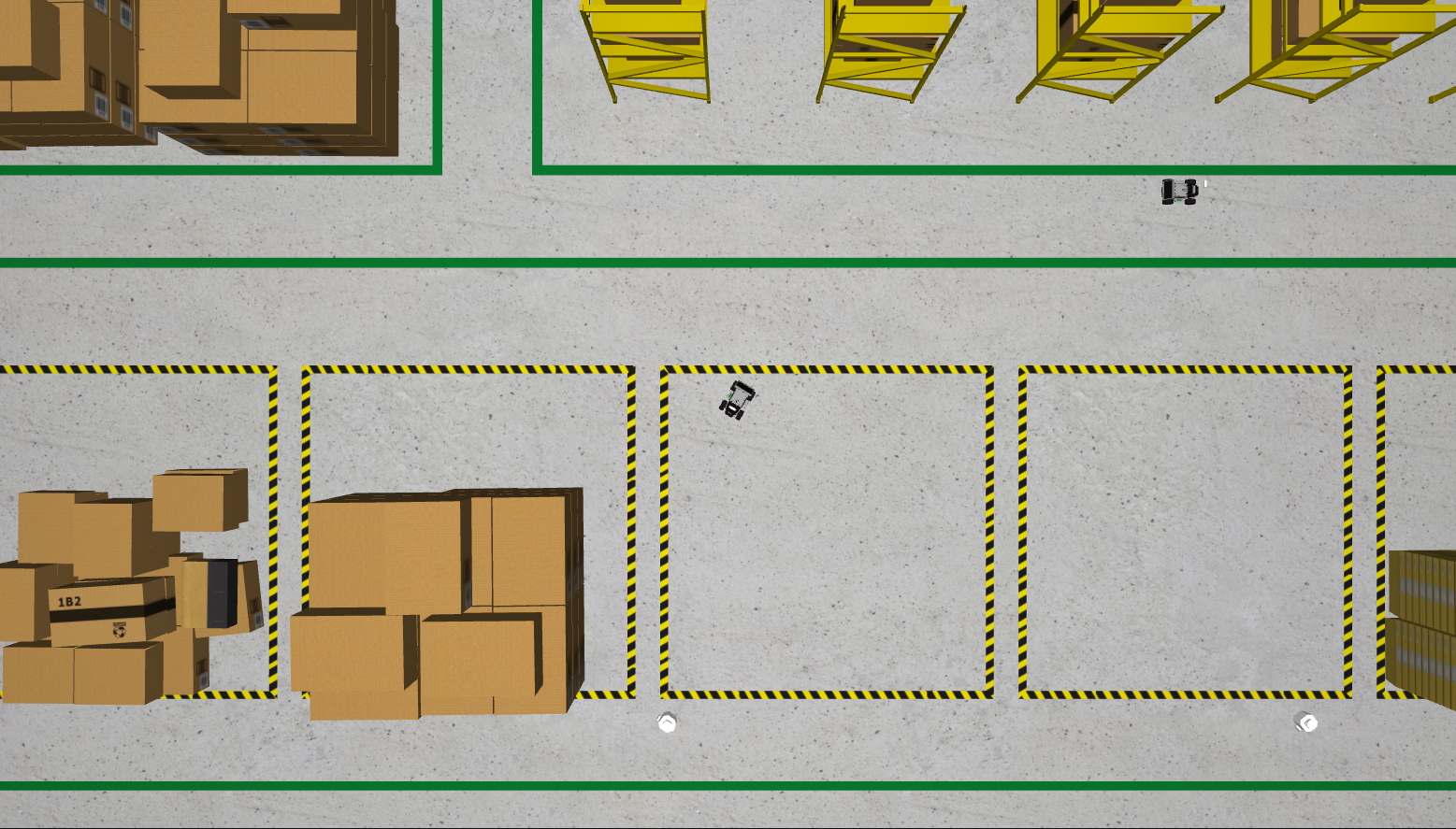
Multi Robot System
Multi Robot System developed for ROS2 Humble, allows the easy incorporation of several robot models with little configuration. There is no limit on the number of robots, if you incorporate UGV you can provide your parameter file for autonomous navigation.
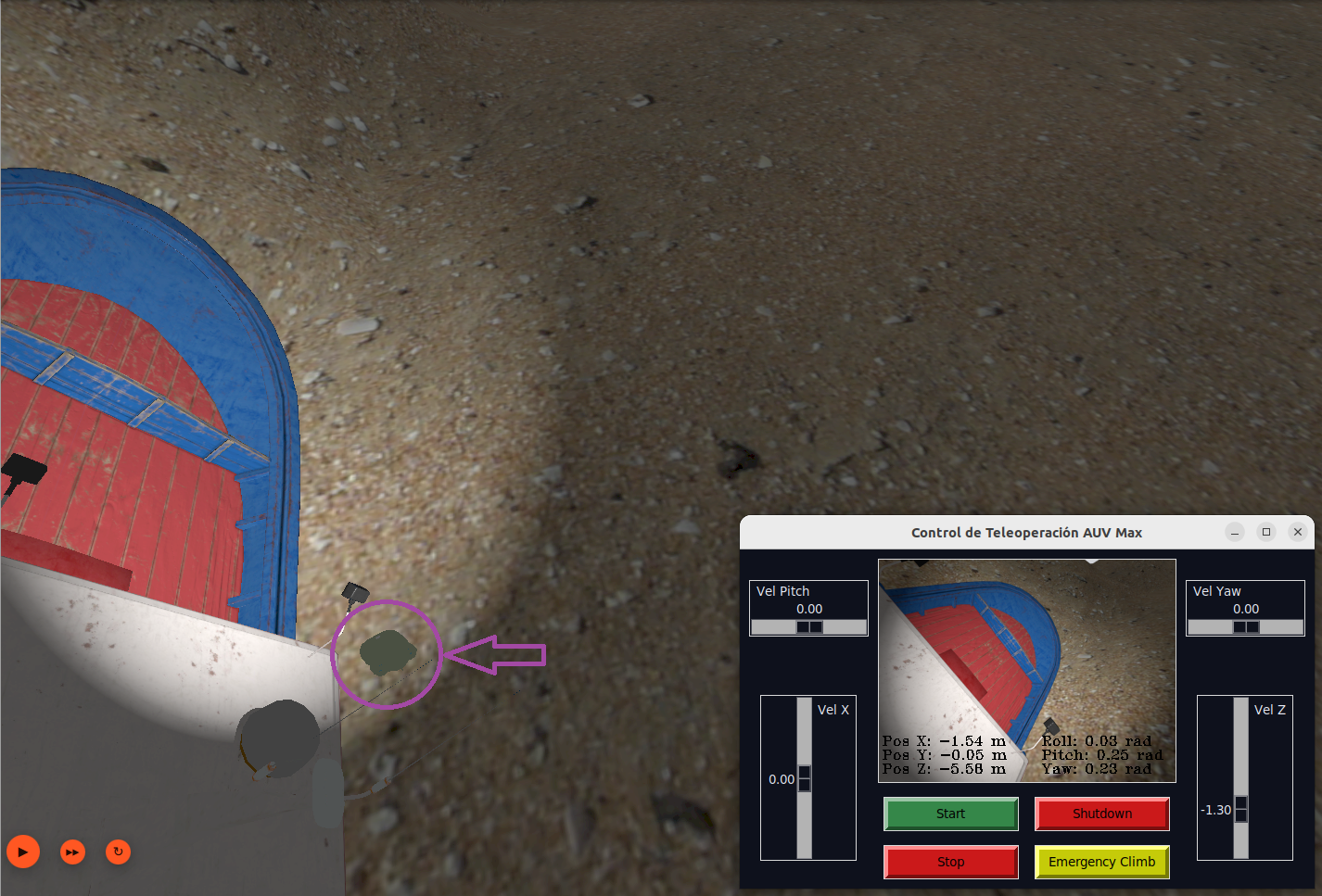
AUV Max: Simulator for Autonomous Underwater Vehicles
It focuses on the development of a submersible UAV, using advanced technologies in robotics, automatic control and machine vision. Developed with ROS2 Humble, Gazebo Garden 7 and Rviz2, this project represents a pioneering effort in the simulation and operation of autonomous underwater vehicles.
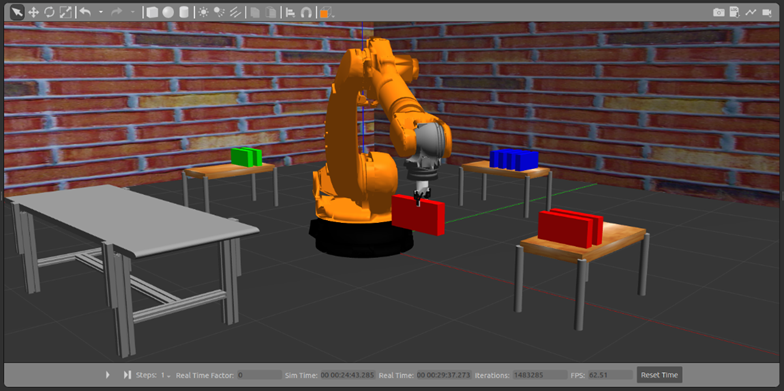
KUKA Kr210 - Pick and Place
It uses ROS Noetic and MoveIt for motion planning and OpenCV for real-time object detection based on color segmentation. The system ensures accurate trajectory execution and seamless communication between perception and control, enabling efficient and autonomous pick and place operations.
No projects found
No projects match your current filter. Try selecting a different category.